Japanese Researchers Teaching Robots to Repair Themselves

When mobile manipulators eventually make it into our homes, self-repair is going to be a very important function. Hopefully, these robots will be durable enough that they won't need to be repaired very often, but from time to time they'll almost certainly need minor maintenance. At Humanoids 2019 in Toronto, researchers from the University of Tokyo showed how they taught a PR2 to perform simple repairs on itself by tightening its own screws. And using that skill, the robot was also able to augment itself, adding accessories like hooks to help it carry more stuff. Clever robot!
To keep things simple, the researchers provided the robot with CAD data that tells it exactly where all of its screws are.
At the moment, the robot can't directly detect on its own whether a particular screw needs tightening, although it can tell if its physical pose doesn't match its digital model, which suggests that something has gone wonky. It can also check its screws autonomously from time to time, or rely on a human physically pointing out that it has a screw loose, using the human's finger location to identify which screw it is. Another challenge is that most robots, like most humans, are limited in the areas on themselves that they can comfortably reach. So to tighten up everything, they might have to find themselves a robot friend to help, just like humans help each other put on sunblock.
The actual tightening is either super easy or quite complicated, depending on the location and orientation of the screw. If the robot is lucky, it can just use its continuous wrist rotation for tightening, but if a screw is located in a tight position that requires an Allen wrench, the robot has to regrasp the tool over and over as it incrementally tightens the screw.
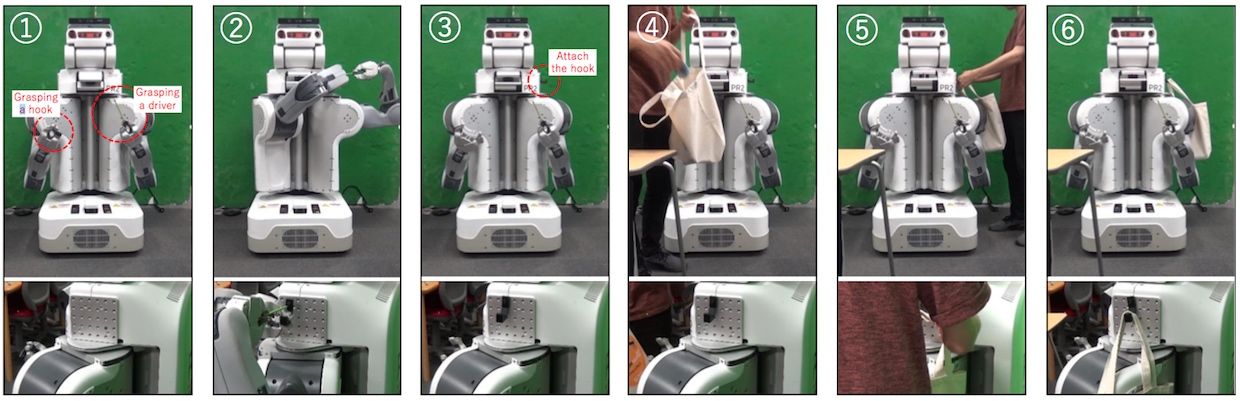 Image: University of Tokyo In one experiment, the researchers taught a PR2 robot to attach a hook to one of its shoulders. The robot uses one hand to grasp the hook and another hand to grasp a screwdriver. The researchers tested the hook by hanging a tote bag on it.
Image: University of Tokyo In one experiment, the researchers taught a PR2 robot to attach a hook to one of its shoulders. The robot uses one hand to grasp the hook and another hand to grasp a screwdriver. The researchers tested the hook by hanging a tote bag on it. The other neat trick that a robot can do once it can tighten screws on its own body is to add new bits of hardware to itself. PR2 was thoughtfully designed with mounting points on its shoulders (or maybe technically its neck) and head, and it turns out that it can reach these points with its manipulators, allowing to modify itself, as the researchers explain:
"Self-Repair and Self-Extension by Tightening Screws based on Precise Calculation of Screw Pose of Self-Body with CAD Data and Graph Search with Regrasping a Driver," by Takayuki Murooka, Kei Okada, and Masayuki Inaba from the University of Tokyo, was presented at Humanoids 2019 in Toronto, Canada. < Back to IEEE Journal WatchWhen PR2 wants to have a lot of things, the only two hands are not enough to realize that. So we let PR2 to use a bag the same as we put it on our shoulder. PR2 started attaching the hook whose pose is calculated with self CAD data with a driver on his shoulder in order to put a bag on his shoulder. PR2 finished attaching the hook, and the people put a lot of cans in a tote bag and put it on PR2's shoulder.