Late Nights, Cool Hacks, and More Stories From the DARPA SubT Urban Circuit
For the past two weeks, teams of robots (and their humans) have been exploring an unfinished nuclear power plant in Washington State as part of DARPA's Subterranean Challenge. The SubT Challenge consists of three separate circuits, each representing a distinct underground environment: tunnel systems, urban underground, and cave networks.
The Urban Circuit portion of the challenge ended last Thursday, and DARPA live streamed all of the course runs and put together some great video recaps of the competition itself. But that footage represents just a small portion of what actually went on at the challenge, as teams raced to implement fixes and improvements in hardware and software in between runs, often staying up all night in weird places trying to get their robots to work better (or work at all).
We visited the SubT Urban Challenge during the official media day last week, and also spent some time off-site with the teams themselves, as they solved problems and tested their robots wherever they could, from nearby high schools to empty malls to hotel stairwells at 5 a.m.
And the winner of the SubT Urban Circuit is...The winner of the SubT Urban Circuit was Team CoSTAR, a collaboration between NASA JPL, MIT, Caltech, KAIST, LTU, and industry partners, including Clearpath Robotics and Boston Dynamics. Second place went to Carnegie Mellon's Team Explorer, which took first at the previous SubT Tunnel Circuit six months ago, setting up a highly competitive Cave Circuit event which will take place six months from now.
We'll have some more details on the teams' final scores, but first here's a brief post-challenge overview video from DARPA to get you caught up:
The Urban Circuit location: an unfinished nuclear power plantThe Urban Circuit of the DARPA Subterranean Challenge was held at the Satsop Nuclear Power Plant, about an hour and a half south of Seattle.
 Photo: DARPA Aerial photo of the unfinished Satsop nuclear power plant.
Photo: DARPA Aerial photo of the unfinished Satsop nuclear power plant. Started in 1977, the plant was about 80 percent complete when state funding fell through, and after nothing happened for a couple of decades, ownership was transferred to the Satsop Redevelopment Project to try and figure out how to turn the aging dystopian infrastructure into something useful. Something useful includes renting the space for people to film action movies, and for DARPA to host challenges.
The biggest difference between Tunnel and Urban is that while Tunnel was mostly, you know, tunnels (mostly long straight-ish passages connected with each other), Urban included a variety of large spaces and interconnected small rooms spread out across multiple levels. This is a 5-minute long walkthrough from DARPA that shows one of the course configurations; you don't need to watch the whole thing, but it should give you a pretty good idea of the sort of environment that these robots had to deal with:
The biggest challenge: Communications, or stairs?While communications were an enormous challenge at the Tunnel Circuit, from talking with the teams it sounded like comms was not nearly as much of an issue at Urban, because of a combination of a slightly friendlier environment (concrete walls instead of meters of solid rock) and teams taking comms very, very seriously as they prepared their systems for this event. More teams used deployable networking nodes to build up a mesh network as their robots progressed farther into the course (more on this later), and there was also more of an emphasis on fully autonomous exploration where robots were comfortable operating for extended periods outside of communication range completely.
 Photo: Evan Ackerman/IEEE Spectrum Team garages at the event. You can't see how cold it is, but if you could, you'd understand why they're mostly empty.
Photo: Evan Ackerman/IEEE Spectrum Team garages at the event. You can't see how cold it is, but if you could, you'd understand why they're mostly empty. When we talked to DARPA SubT Program Manager Tim Chung a few weeks ago, he was looking forward to creating an atmosphere of warm camaraderie between teams:
Another challenge: Finding a warm place to test the robotsI'm super excited about how we set up the team garages at the Urban Circuit. It'll be like pit row, in a way that really highlights how much I value the interactions between teams, it'll be an opportunity to truly capitalize on having a high concentration of enthusiastic and ambitious roboticists in one area.
Having all the teams gathered at their garages would have been pretty awesome, except that the building somehow functioned as a giant heat sink, and while it was in the mid-30s Fahrenheit outside, it felt like the mid-20s inside! Neither humans nor robots had any particular desire to spend more time in the garages than was strictly necessary-most teams would arrive immediately before the start of their run staging time, and then escape to somewhere warmer immediately after their run ended.
It wasn't just a temperature thing that kept teams out of the garages-to test effectively, most teams needed a lot more dedicated space than was available on-site. Teams understood how important test environments were after the Tunnel Circuit, and most of them scrounged up spaces well in advance. Team CSIRO DATA61 found an indoor horse paddock at the local fairgrounds. Team CERBERUS set up in an empty storefront in a half dead mall about 20 miles away. And Team CoSTAR took over the conference center at a local hotel, which turned out to be my hotel, as I discovered when I met Spot undergoing testing in the hallway outside of my room right after I checked in:
 Photo: Evan Ackerman/IEEE Spectrum Team CoSTAR's Spot robot (on loan from Boston Dynamics) undergoing testing in a hotel hallway.
Photo: Evan Ackerman/IEEE Spectrum Team CoSTAR's Spot robot (on loan from Boston Dynamics) undergoing testing in a hotel hallway. Spot is not exactly the stealthiest of robots, and the hotel testing was not what you'd call low-key. I can tell you that CoSTAR finished their testing at around 5:15 a.m., when Spot's THUMP THUMP THUMP THUMP THUMPing gait woke up pretty much the entire hotel as the robot made its way back to its hotel room. Spot did do a very good job on the stairs, though:
 Photo: Evan Ackerman/IEEE Spectrum Even with its top-heavy JPL autonomy and mapping payload, Spot was able to climb stairs without too much trouble.
Photo: Evan Ackerman/IEEE Spectrum Even with its top-heavy JPL autonomy and mapping payload, Spot was able to climb stairs without too much trouble. After the early morning quadrupedal wake-up call, I put on every single layer of clothing I'd brought and drove up to the competition site for the DARPA media day. We were invited to watch the beginning of a few competition runs, take a brief course tour (after being sworn to secrecy), and speak with teams at the garages before and after their runs. During the Tunnel circuit, I'd focused on the creative communications strategies that each team was using, but for Urban, I asked teams to tell me about some of the clever hacks they'd come up with to solve challenges specific to the Urban circuit.
Here's some of what teams came up with:
Team NCTUTeam NCTU from Taiwan has some of the most consistently creative approaches to the DARPA SubT courses we've seen. They're probably best known for their "Duckiefloat" blimps, which had some trouble fitting through narrow tunnels during the Tunnel circuit six months ago. Knowing that passages would be even slimmer for the Urban Circuit, NCTU built a carbon fiber frame around the Duckiefloats to squish their sides in a bit.
 Photo: Evan Ackerman/IEEE Spectrum Duckiefloat is much slimmer (if a bit less pleasingly spherical) thanks to a carbon fiber framework that squeezes it into a more streamlined shape to better fit through narrow corridors.
Photo: Evan Ackerman/IEEE Spectrum Duckiefloat is much slimmer (if a bit less pleasingly spherical) thanks to a carbon fiber framework that squeezes it into a more streamlined shape to better fit through narrow corridors. NCTU also added millimeter wave radar to one of the Duckiefloats as a lighter substitute for on-board lidar or RGBD cameras, and had good results navigating with the radar alone, which (as far as I know) is a totally unique approach. We will definitely be seeing more of Duckiefloat for the cave circuit.
 Photo: Evan Ackerman/IEEE Spectrum NCTU's Anchorball droppable WiFi nodes now include a speaker, which the Husky UGV can localize with microphone arrays (the black circle with the white border).
Photo: Evan Ackerman/IEEE Spectrum NCTU's Anchorball droppable WiFi nodes now include a speaker, which the Husky UGV can localize with microphone arrays (the black circle with the white border). At Tunnel, NCTU dropped mesh WiFi nodes that doubled as beacons, called Anchorballs. For Urban, the Anchorballs are 100 percent less ball-like, and incorporate a speaker, which plays chirping noises once deployed. Microphone arrays on the Husky UGVs can localize this chirping, allowing multiple robots to use the nodes as tie points to coordinate their maps.
 Photo: Evan Ackerman/IEEE Spectrum NCTU is developing mobile mesh network nodes in the form of autonomous robot balls.
Photo: Evan Ackerman/IEEE Spectrum NCTU is developing mobile mesh network nodes in the form of autonomous robot balls. Also under development at NCTU is this mobile Anchorball, which is basically a big Sphero with a bunch of networking gear packed into it that can move itself around to optimize signal strength.
Team NUS SEDSTeam NUS SEDS accidentally burned out a couple of the onboard computers driving their robots. The solution was to run out and buy a laptop, and then 3D print some mounts to attach the laptop to the top of the robot and run things from there.
 Photo: Evan Ackerman/IEEE Spectrum When an onboard computer burned out, NUS SEDS bought a new laptop to power their mobile robot, because what else are you going to do?
Photo: Evan Ackerman/IEEE Spectrum When an onboard computer burned out, NUS SEDS bought a new laptop to power their mobile robot, because what else are you going to do? They also had a larger tracked vehicle that was able to go up and down stairs, but it got stuck in customs and didn't make it to the competition at all.
Team ExplorerTeam Explorer did extensive testing in an abandoned hospital in Pittsburgh, which I'm sure wasn't creepy at all. While they brought along some drones that were used very successfully, getting their beefy wheeled robots up and down stairs wasn't easy. To add some traction, Explorer cut chunks out of the wheels on one of their robots to help it grip the edges of stairs.
 Photo: Evan Ackerman/IEEE Spectrum Team Explorer's robot has wedges cut out of its wheels to help it get a grip on stairways.
Photo: Evan Ackerman/IEEE Spectrum Team Explorer's robot has wedges cut out of its wheels to help it get a grip on stairways. It doesn't look especially sophisticated, but the team lead Sebastian Scherer told me that this was the result of 14 (!) iterations of wheel and track modifications.
Team MARBLESix months ago, we checked out a bunch of different creative communications strategies that teams used at SubT Tunnel. MARBLE improved on their droppable wireless repeater nodes with a powered, extending antenna (harvested from a Miata, apparently).
 Photo: Evan Ackerman/IEEE Spectrum After being dropped from its carrier robot, this mesh networking node extends its antennas half a meter into the air to maximize signal strength.
Photo: Evan Ackerman/IEEE Spectrum After being dropped from its carrier robot, this mesh networking node extends its antennas half a meter into the air to maximize signal strength. This is more than just a neat trick: We were told that the extra height that the antennas have once fully deployed does significantly improve their performance.
Team RobotikaBased on their experience during the Tunnel Circuit, Team Robotika decided that there was no such thing as having too much light in the tunnels, so they brought along a robot with the most enormous light-to-robot ratio that we saw at SubT.
 Photo: Evan Ackerman/IEEE Spectrum No such thing as too much light during DARPA SubT.
Photo: Evan Ackerman/IEEE Spectrum No such thing as too much light during DARPA SubT. Like many other teams, Robotika was continually making minor hardware adjustments to refine the performance of their robots and make them more resilient to the environment. These last-minute plastic bumpers would keep the robot from driving up walls and potentially flipping itself over.
 Photo: Evan Ackerman/IEEE Spectrum A bumper hacked together from plastic and duct tape keeps this robot from flipping itself over against walls. Team CSIRO Data61
Photo: Evan Ackerman/IEEE Spectrum A bumper hacked together from plastic and duct tape keeps this robot from flipping itself over against walls. Team CSIRO Data61 I met CSIRO Data61 (based in Australia) at the testing location they'd found in a building at the Grays Harbor County Fairgrounds, right next to an indoor horse arena that provided an interesting environment, especially for their drones. During their first run, one of their large tracked robots (an ex-police robot called Titan) had the misfortune to get its track caught on an obstacle that was exactly the wrong size, and it burned out a couple motors trying to get free.
 Photo: Evan Ackerman/IEEE Spectrum A burned motor, crispy on the inside.
Photo: Evan Ackerman/IEEE Spectrum A burned motor, crispy on the inside. You can practically smell that through the screen, right? And these are fancy Maxon motors, which you can't just pick up at your local hardware store. CSIRO didn't have spares with them, so the most expedient way to get new motors that were sure to work turned out to be flying another team member over from Australia (!) with extra motors in their carry-on luggage. And by Tuesday morning, the Titan was up and running again.
 Photo: Evan Ackerman/IEEE Spectrum A fully operational Titan beside a pair of commercial SuperDroid robots at CSIRO's off-site testing area. Team CERBERUS
Photo: Evan Ackerman/IEEE Spectrum A fully operational Titan beside a pair of commercial SuperDroid robots at CSIRO's off-site testing area. Team CERBERUS Team CERBERUS didn't have a run scheduled during the SubT media day, but they invited me to visit their testing area in an empty store next to an Extreme Fun Center in a slightly depressing mall in Aberdeen (Kurt Cobain's hometown), about 20 miles down the road from Satsop. CERBERUS was using a mix of wheeled vehicles, collision-tolerant drones, and ANYmal legged robots.
 Photo: Evan Ackerman/IEEE Spectrum Team CERBERUS doing some off-site testing of their robots with the lights off.
Photo: Evan Ackerman/IEEE Spectrum Team CERBERUS doing some off-site testing of their robots with the lights off. CERBERUS had noticed during a DARPA course pre-briefing that the Alpha course had an almost immediate 90-degree turn before a long passage, which would block any directional antennas placed in the staging area. To try to maximize communication range, they developed this dumb antenna robot: Dumb in the sense that it has no sensing or autonomy, but instead is designed to carry a giant tethered antenna just around that first corner.
 Photo: Evan Ackerman/IEEE Spectrum Basically just a remote-controlled directional antenna, CERBERUS developed this robot to extend communications from their base station around the first corner of Alpha Course.
Photo: Evan Ackerman/IEEE Spectrum Basically just a remote-controlled directional antenna, CERBERUS developed this robot to extend communications from their base station around the first corner of Alpha Course. Another communications challenge was how to talk to robots after they traversed down a flight of stairs. Alpha Course featured a flight of stairs going downwards just past the starting gate, and CERBERUS wanted a way of getting a mesh networking node down those stairs to be able to reliably talk to robots exploring the lower level. Here's what they came up with:
 Photo: Evan Ackerman/IEEE Spectrum A mesh network node inside of a foam ball covered in duct tape can be thrown by a human into hard-to-reach spots near the starting area.
Photo: Evan Ackerman/IEEE Spectrum A mesh network node inside of a foam ball covered in duct tape can be thrown by a human into hard-to-reach spots near the starting area. The initial idea was to put a node into a soccer ball which would then be kicked from the staging area, off the far wall, and down the stairs, but they ended up finding some hemispheres of green foam used for flower arrangements at Walmart, hollowed them out, put in a node, and then wrapped the whole thing in duct tape. With the addition of a tether, the node in a ball could be thrown from the staging area into the stairwell, and brought back up with the tether if it didn't land in the right spot.
Plan B for stairwell communications was a bit more of a brute force approach, using a directional antenna on a stick that could be poked out of the starting area and angled over the stairwell.
 Photo: Evan Ackerman/IEEE Spectrum If your antenna balls don't work? Just add a directional antenna to a stick.
Photo: Evan Ackerman/IEEE Spectrum If your antenna balls don't work? Just add a directional antenna to a stick. Since DARPA did allow tethers, CERBERUS figured that this was basically just a sort of rigid tether. Sounds good to me!
Team CoSTARTeam CoSTAR surprised everyone by showing up to the SubT Urban Circuit with a pair of Spot quadrupeds from Boston Dynamics. The Spots were very much a last-minute addition to the team, and CoSTAR only had about six weeks to get them up and (metaphorically) running. Consequently, the Spots were a little bit overburdened with a payload that CoSTAR hasn't had much of a chance to optimize. The payload takes care of all of the higher level autonomy and map making and stuff, while Spot's own sensors handle the low-level motion planning.
 Photo: Evan Ackerman/IEEE Spectrum Team CoSTAR's Spot robots carried a payload that was almost too heavy for the robot to manage, and included sensors, lights, computers, batteries, and even two mesh network node droppers.
Photo: Evan Ackerman/IEEE Spectrum Team CoSTAR's Spot robots carried a payload that was almost too heavy for the robot to manage, and included sensors, lights, computers, batteries, and even two mesh network node droppers. In what would be a spectacular coincidence were both of these teams not packed full of brilliant roboticists, Team CoSTAR independently came up with something very similar to the throwable network node that Team CERBERUS was messing around with.
 Photo: Evan Ackerman/IEEE Spectrum A throwable mesh network node embedded in a foam ball that could be bounced into a stairwell to extend communications.
Photo: Evan Ackerman/IEEE Spectrum A throwable mesh network node embedded in a foam ball that could be bounced into a stairwell to extend communications. One of the early prototypes of this thing was a Mars lander-style "airbag" system, consisting of a pyramid of foam balls with a network node embedded in the very center of the pile. They showed me a video of this thing, and it was ridiculously cool, but they found that carving out the inside of a foam ball worked just as well and was far easier to manage.
There was only so much testing that CoSTAR was able to do in the hotel and conference center, since a better match for the Urban Circuit would be a much larger area with long hallways, small rooms, and multiple levels that could be reached by ramps and stairs. So every evening, the team and their robots drove 10 minutes down the road to Elma High School, which seemed to be just about the perfect place for testing SubT robots. CoSTAR very kindly let me tag along one night to watch their Huskies and Spots explore the school looking for artifacts, and here are some pictures that I took.
 Photo: Evan Ackerman/IEEE Spectrum The Elma High School cafeteria became the staging area for Team CoSTAR's SubT test course. Two Boston Dynamics Spot robots and two Clearpath Robotics Huskies made up CoSTAR's team of robots. The yellow total station behind the robots is used for initial location calibration, and many other teams relied on them as well.
Photo: Evan Ackerman/IEEE Spectrum The Elma High School cafeteria became the staging area for Team CoSTAR's SubT test course. Two Boston Dynamics Spot robots and two Clearpath Robotics Huskies made up CoSTAR's team of robots. The yellow total station behind the robots is used for initial location calibration, and many other teams relied on them as well.  Photo: Evan Ackerman/IEEE Spectrum Team CoSTAR hid artifacts all over the school to test the robots' ability to autonomously recognize and locate them. That's a survivor dummy down the hall.
Photo: Evan Ackerman/IEEE Spectrum Team CoSTAR hid artifacts all over the school to test the robots' ability to autonomously recognize and locate them. That's a survivor dummy down the hall. JPL put together this video of one of the test runs, which cuts out the three hours of setup and calibration and condenses all the good stuff into a minute and a half:
DARPA SubT Urban Circuit: Final scoresIn their final SubT Urban run, CoSTAR scored a staggering 9 points, giving them a total of 16 for the Urban Circuit, 5 more than Team Explorer, which came in second. Third place went to Team CTU-CRAS-NORLAB, and as a self-funded (as opposed to DARPA-funded) team, they walked away with a $500,000 prize.
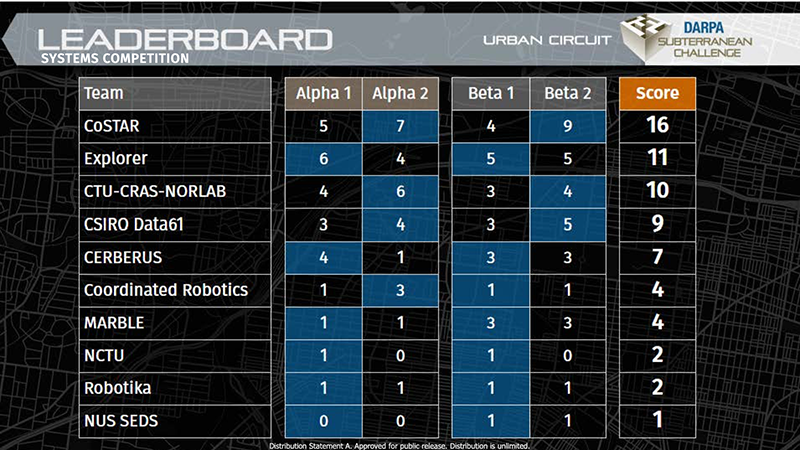 Image: DARPA DARPA SubT Urban Circuit final scores.
Image: DARPA DARPA SubT Urban Circuit final scores. Six months from now, all of these teams will meet again to compete at the SubT Cave Circuit, the last (and perhaps most challenging) domain that DARPA has in store. We don't yet know exactly when or where Cave will take place, but we do know that we'll be there to see what six more months of hard work and creativity can do for these teams and their robots.
Special thanks to DARPA for putting on this incredible event, and thanks also to the teams that let me follow them around and get (ever so slightly) in the way for a day or two.