We Can Do Better Than Human-Like Hands for Robots

One strategy for designing robots that are capable in anthropomorphic environments is to make the robots themselves as anthropomorphic as possible. It makes sense-for example, there are stairs all over the place because humans have legs, and legs are good at stairs, so if we give robots legs like humans, they'll be good at stairs too, right? We also see this tendency when it comes to robotic grippers, because robots need to grip things that have been optimized for human hands.
Despite some amazing robotic hands inspired by the biology of our own human hands, there are also opportunities for creativity in gripper designs that do things human hands are not physically capable of. At ICRA 2020, researchers from Stanford University presented a paper on the design of a robotic hand that has fingers made of actuated rollers, allowing it to manipulate objects in ways that would tie your fingers into knots.
While it's got a couple fingers, this prototype roller grasper" hand tosses anthropomorphic design out the window in favor of unique methods of in-hand manipulation. The roller grasper does share some features with other grippers designed for in-hand manipulation using active surfaces (like conveyor belts embedded in fingers), but what's new and exciting here is that those articulated active roller fingertips (or whatever non-anthropomorphic name you want to give them) provide active surfaces that are steerable. This means that the hand can grasp objects and rotate them without having to resort to complex sequences of finger repositioning, which is how humans do it.
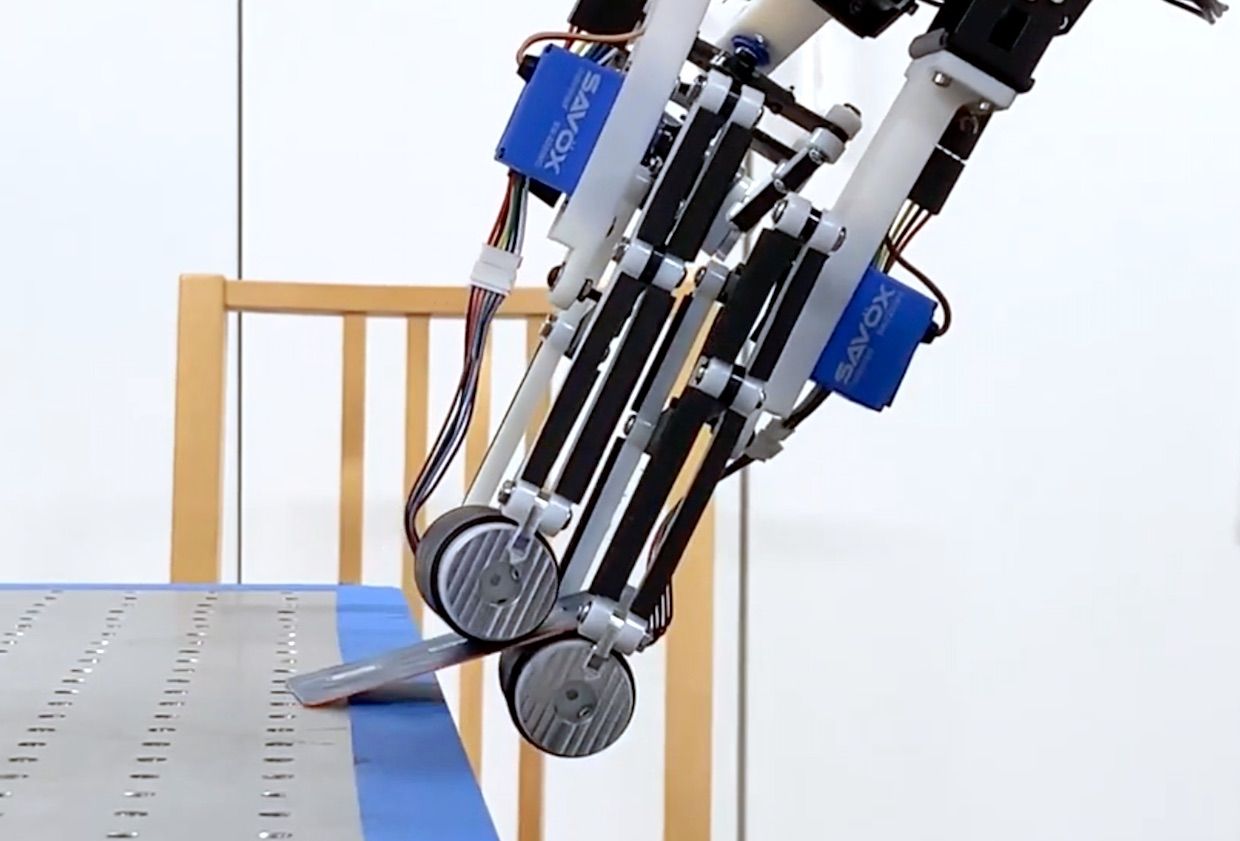 Photo: Stanford University Things like picking something flat off of a table, always tricky for robotic hands (and sometimes for human hands as well), is a breeze thanks to the fingertip rollers.
Photo: Stanford University Things like picking something flat off of a table, always tricky for robotic hands (and sometimes for human hands as well), is a breeze thanks to the fingertip rollers. Each of the hand's fingers has three actuated degrees of freedom, which result in several different ways in which objects can be grasped and manipulated. Things like picking something flat off of a table, always tricky for robotic hands (and sometimes for human hands as well), is a breeze thanks to the fingertip rollers. The motion of an object in this gripper isn't quite holonomic, meaning that it can't arbitrarily reorient things without sometimes going through other intermediate steps. And it's also not compliant in the way that many other grippers are, limiting some types of grasps. This particular design probably won't replace every gripper out there, but it's particularly skilled at some specific kinds of manipulations in a way that makes it unique.
We should be clear that it's not the intent of this paper (or of this article!) to belittle five-fingered robotic hands-the point is that there are lots of things that you can do with totally different hand designs, and just because humans use one kind of hand doesn't mean that robots need to do the same if they want to match (or exceed) some specific human capabilities. If we could make robotic hands with five fingers that had all of the actuation and sensing and control that our own hands do, that would be amazing, but it's probably decades away. In the meantime, there are plenty of different designs to explore.
And speaking of exploring different designs, these same folks are already at work on version two of their hand, which replaces the fingertip rollers with fingertip balls:
For more on this new version of the hand (among other things), we spoke with lead author Shenli Yuan via email. And the ICRA page is here if you have questions of your own.
IEEE Spectrum: Human hands are often seen as the standard for manipulation. When adding degrees of freedom that human hands don't have (as in your work) can make robotic hands more capable than ours in many ways, do you think we should still think of human hands as something to try and emulate?
Shenli Yuan: Yes, definitely. Not only because human hands have great manipulation capability, but because we're constantly surrounded by objects that were designed and built specifically to be manipulated by the human hand. Anthropomorphic robot hands are still worth investigating, and still have a long way to go before they truly match the dexterity of a human hand. The design we came up with is an exploration of what unique capabilities may be achieved if we are not bound by the constraints of anthropomorphism, and what a biologically impossible mechanism may achieve in robotic manipulation. In addition, for lots of tasks, it isn't necessarily optimal to try and emulate the human hand. Perhaps in 20 to 50 years when robot manipulators are much better, they won't look like the human hand that much. The design constraints for robotics and biology have points in common (like mechanical wear, finite tendons stiffness) but also major differences (like continuous rotation for robots and less heat dissipation problems for humans).
For lots of tasks, it isn't necessarily optimal to try and emulate the human hand. Perhaps in 20 to 50 years when robot manipulators are much better, they won't look like the human hand that much." -Shenli Yuan, Stanford UniversityWhat are some manipulation capabilities of human hands that are the most difficult to replicate with your system?
There are a few things that come to mind. It cannot perform a power grasp (using the whole hand for grasping as opposed to pinch grasp that uses only fingertips), which is something that can be easily done by human hands. It cannot move or rotate objects instantaneously in arbitrary directions or about arbitrary axes, though the human hand is somewhat limited in this respect as well. It also cannot perform gaiting. That being said, these limitations exist largely because this grasper only has 9 degrees of freedom, as opposed to the human hand which has more than 20. We don't think of this grasper as a replacement for anthropomorphic hands, but rather as a way to provide unique capabilities without all of the complexity associated with a highly actuated, humanlike hand.
What's the most surprising or impressive thing that your hand is able to do?
The most impressive feature is that it can rotate objects continuously, which is typically difficult or inefficient for humanlike robot hands. Something really surprising was that we put most of our energy into the design and analysis of the grasper, and the control strategy we implemented for demonstrations is very simple. This simple control strategy works surprisingly well with very little tuning or trial-and-error.
With this many degrees of freedom, how complicated is it to get the hand to do what you want it to do?
The number of degrees of freedom is actually not what makes controlling it difficult. Most of the difficulties we encountered were actually due to the rolling contact between the rollers and the object during manipulation. The rolling behavior can be viewed as constantly breaking and re-establishing contacts between the rollers and objects, this very dynamic behavior introduces uncertainties in controlling our grasper. Specifically, it was difficult estimating the velocity of each contact point with the object, which changes based on object and finger position, object shape (especially curvature), and slip/no slip.
What more can you tell us about Roller Grasper V2?
Roller Grasper V2 has spherical rollers, while the V1 has cylindrical rollers. We realized that cylindrical rollers are very good at manipulating objects when the rollers and the object form line contacts, but it can be unstable when the grasp geometry doesn't allow for a line contact between each roller and the grasped object. Spherical rollers solve that problem by allowing predictable points of contact regardless of how a surface is oriented.
The parallelogram mechanism of Roller Grasper V1 makes the pivot axis offset a bit from the center of the roller, which made our control and analysis more challenging. The kinematics of the Roller Grasper V2 is simpler. The base joint intersects with the finger, which intersects with the pivot joint, and the pivot joint intersects with the roller joint. It's symmetrical design and simpler kinematics make our control and analysis a lot more straightforward. Roller Grasper V2 also has a larger pivot range of 180 degrees, while V1 is limited to 90 degrees.
In terms of control, we implemented more sophisticated control strategies (including a hand-crafted control strategy and an imitation learning based strategy) for the grasper to perform autonomous in-hand manipulation.
Design of a Roller-Based Dexterous Hand for Object Grasping and Within-Hand Manipulation," by Shenli Yuan, Austin D. Epps, Jerome B. Nowak, and J. Kenneth Salisbury from Stanford University is being presented at ICRA 2020. < Back to IEEE Journal Watch