Autonomous Robots Could Mine the Deep Seafloor
A battle is brewing over the fate of the deep ocean. Huge swaths of seafloor are rich in metals-nickel, copper, cobalt, zinc-that are key to making electric vehicle batteries, solar panels, and smartphones. Mining companies have proposed scraping and vacuuming the dark expanse to provide supplies for metal-intensive technologies. Marine scientists and environmentalists oppose such plans, warning of huge and potentially permanent damage to fragile ecosystems.
Pietro Filardo is among the technology developers who are working to find common ground.
 Image: Pliant Energy Systems
Image: Pliant Energy Systems His company, Pliant Energy Systems, has built what looks like a black mechanical stingray. Its soft, rippling fins use hyperbolic geometry to move in a traveling wave pattern, propelling the skateboard-sized device through water. From an airy waterfront lab in Brooklyn, New York, Filardo's team is developing tools and algorithms to transform the robot into an autonomous device equipped with grippers. Their goal is to pluck polymetallic nodules-potato-sized deposits of precious ores-off the seafloor without disrupting precious habitats.
On the one hand, we need these metals to electrify and decarbonize. On the other hand, people worry we're going to destroy deep ocean ecosystems that we know very little about," Filardo said. He described deep sea mining as the killer app" for Pliant's robot-a potentially lucrative use for the startup's minimally invasive design.
How deep seas will be mined, and where, is ultimately up to the International Seabed Authority (ISA), a group of 168 member countries. In October, the intergovernmental body is expected to adopt a sweeping set of technical and environmental standards, known as the Mining Code, that could pave the way for private companies to access large tracts of seafloor.
The ISA has already awarded 30 exploratory permits to contractors in sections of the Atlantic, Pacific, and Indian Oceans. Over half the permits are for prospecting polymetallic nodules, primarily in the Clarion-Clipperton Zone, a hotspot south of Hawaii and west of Mexico.
Researchers have tested nodule mining technology since the 1970s, mainly in national waters. Existing approaches include sweeping the seafloor with hydraulic suction dredges to pump up sediment, filter out minerals, and dump the resulting slurry in the ocean or tailing ponds. In India, the National Institute of Ocean Technology is building a tracked crawler" vehicle with a large scoop to collect, crush, and pump nodules up to a mother ship.
Mining proponents say such techniques are better for people and the environment than dangerous, exploitative land-based mining practices. Yet ocean experts warn that stirring up sediment and displacing organisms that live on nodules could destroy deep sea habitats that took millions of years to develop.
One thing I often talk about is, How do we fix it if we break it? How are we going to know we broke it?'" said Cindy Lee Van Dover, a deep sea biologist and professor at Duke University's Nicholas School of the Environment. She said much more research is required to understand the potential effects on ocean ecosystems, which foster fisheries, absorb carbon dioxide, and produce most of the Earth's oxygen.
Significant work is also needed to transform robots into metal collectors that can operate some 6,000 meters below the ocean surface.
 Photo: Pliant Energy Systems Former Pliant engineers Daniel Zimmerman (right) and Michael Weaker work on a prototype that harnesses energy from rivers and streams-the precursor to Velox.
Photo: Pliant Energy Systems Former Pliant engineers Daniel Zimmerman (right) and Michael Weaker work on a prototype that harnesses energy from rivers and streams-the precursor to Velox. Pliant's first prototype, called Velox, can navigate the depths of a swimming pool and the shallow ocean surf zone" where waves crash into the sand. Inside Velox, an onboard CPU distributes power to actuators that drive the undulating motions in the flexible fins. Unlike a propeller thruster, which uses a rapidly rotating blade to move small jets of water at high velocity, Pliant's undulating fins move large volumes of water at low velocity. By using the water's large surface area, the robot can make rapid local maneuvers using relatively little battery input, allowing the device to operate for longer periods before needing to recharge, Filardo said.
The design also stirs up less sediment on the seafloor, a potential advantage in sensitive deep sea environments, he added.
The Brooklyn company is partnering with the Massachusetts Institute of Technology to develop a larger next-generation robot, called C-Ray. The highly maneuverable device will twist and roll like a sea otter. Using metal detectors and a mix of camera hardware and computer algorithms, C-Ray will likely be used to surveil the surf zone for potential hazards to the U.S. Navy, who is sponsoring the research program.
 Illustration: Pliant Energy Systems A conceptual illustration of C-Ray robots collecting deep sea polymetallic nodules.
Illustration: Pliant Energy Systems A conceptual illustration of C-Ray robots collecting deep sea polymetallic nodules. The partners ultimately aim to deploy swarms" of autonomous C-Rays that communicate via a hive mind"-applications that would also serve to mine polymetallic nodules. Pliant envisions launching hundreds of gripper-equipped robots that roam the seafloor and place nodules in cages that float to the surface on gas-filled lift bags. Filardo suggested that C-Ray could also swap nodules with lower-value stones, allowing organisms to regrow on the seafloor.
A separate project in Italy may also yield new tools for plucking the metal-rich orbs.
SILVER2 is a six-legged robot that can feel its way around the dark and turbid seafloor, without the aid of cameras or lasers, by pushing its legs in repeated, frequent cycles.
We started by looking at what crabs did underwater," said Marcello Calisti, an assistant professor at the BioRobotics Institute, in the Sant'Anna School of Advanced Studies. He likened the movements to people walking waist-deep in water and using the sand as leverage, or the punter" on a flat-bottomed river boat who uses a long wooden pole to propel the vessel forward.
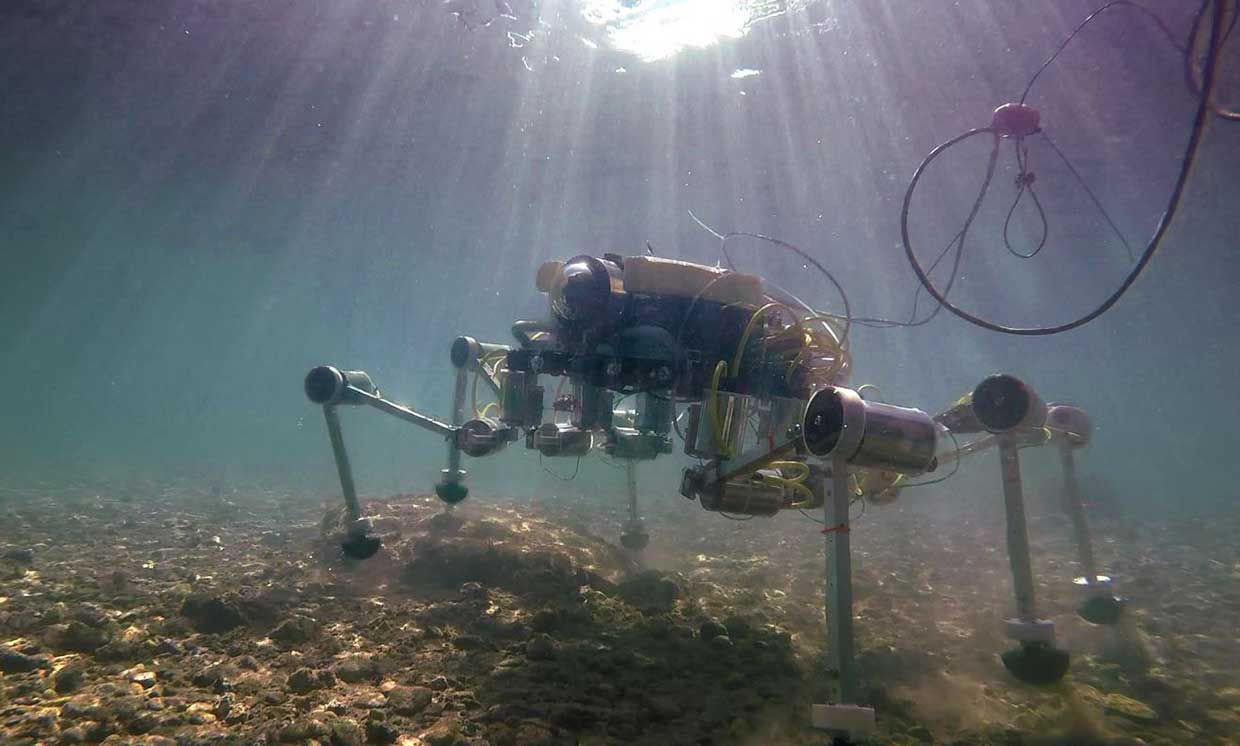 Photo: BioRobotics Institute/Sant'Anna School of Advanced Studies
Photo: BioRobotics Institute/Sant'Anna School of Advanced Studies Calisti and colleagues spent most of July at a seaside lab in Livorno, Italy, testing the 20-kilogram prototype in shallow water. SILVER2 is equipped with a soft elastic gripper that gently envelopes objects, as if cupping them in the palm of a hand. Researchers used the crab-like robot to collect plastic litter on the seabed and deposit the debris in a central collection bin.
Although SILVER2 isn't intended for deep sea mining, Calisti said he could foresee potential applications in the sector if his team can scale the technology.
For developers like Pliant, their ability to raise funding and achieve their mining robots will largely depend on the International Seabed Authority's next meeting. Opponents of ocean mining are pushing to pause discussions on the Mining Code to give scientists more time to evaluate risks, and to allow companies like Tesla or Apple to devise technologies that require fewer or different metal parts. Such regulatory uncertainty could dissuade investors from backing new mining approaches that might never be used.
The biologist Van Dover said she doesn't outright oppose the Mining Code; rather, rules should include stringent stipulations, such as requirements to monitor environmental impacts and immediately stop operations once damage is detected. I don't see why the code couldn't be so well-written that it would not allow the ISA to make a mistake," she said.