Video Friday: Modular Polygons
by Evan Ackerman from IEEE Spectrum on (#6C7ST)
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
Enjoy today's videos!
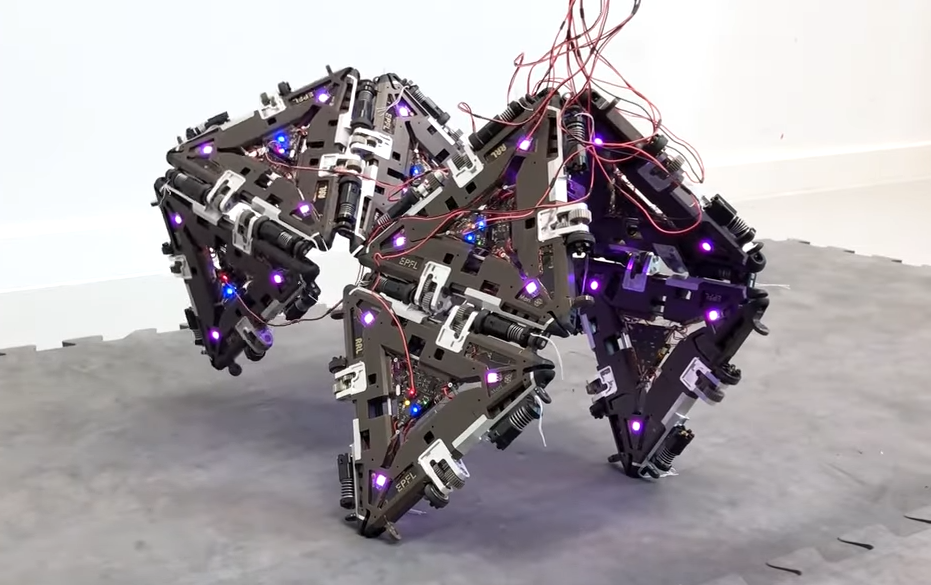
The Mori3 is a modular robot built by the Reconfigurable Robotics Lab at EPFL. The Mori3 can change its own shape and function through changing the way its modules interconnect. Each module is its own robot; each has its own power, motors, and sensors. By themselves, they can drive around on the ground and change the length of each of their triangular edges. However, working together, they function as a complete system capable of achieving many different types of tasks. The Mori3 is geared towards difficult-to-reach environments where the task isn't always known ahead of time, such as outer space.
[ EPFL ]
This video details the creation of the Dingo, a low-cost robot quadruped designed and built by Alexander Calvert and Nathan Ferguson as a capstone engineering project for the bachelor of Robotics and Mechatronics Engineering at Monash University. Total cost is about $1,300 AUD. The full bill of materials can be found on GitHub.
[ GitHub ]
Thanks, Michael!
ABB Robotics and Junglekeepers, a nonprofit dedicated to replanting the Amazon rainforest in Peru, have joined forces to work on a special pilot program. Our mission: to find ways of using technology to help with one of the biggest problems of our time, the destruction of the rainforest, while freeing up rangers' time to patrol and teach locals about the importance of preserving this precious resource.
[ ABB ]
We are pleased to share with you the latest progress in our flying humanoid robot project. Jet-HR2 has been able to track the desired trajectory in the air for hovering. The robot made four 90-degree yaw turns in the air according to a predefined square trajectory and returned to its initial position for landing. The relevant technical details will be specified in a upcoming paper.
My favorite part of this video is the poor guy in the back, desperately covering his ears.
Thanks, Zhifeng!
This paper presents for the first time a shape memory alloy (SMA) wire-reinforced soft bending actuator made out of a castor oil-based self-healing polymer, with the incorporated ability to recover from large incisions via shape memory assisted healing. The integrated SMA wires serve three major purposes: (i) Large incisions are closed by contraction of the current-activated SMA wires that are integrated into the chamber. These pull the fracture surfaces into contact, enabling the healing. (ii) The heat generated during the activation of the SMA wires is synergistically exploited for accelerating the healing. (iii) Lastly, during pneumatic actuation, the wires constrain radial expansion and one-side longitudinal extension of the soft chamber, effectuating the desired actuator bending motion.
[ Nature ]
Thanks, Bram!
Researchers led by the University of California, San Diego, have developed a new model that trains four-legged robots to see more clearly in 3D. The advance enabled a robot to autonomously cross challenging terrain with ease-including stairs, rocky ground, and gap-filled paths-while clearing obstacles in its way.
[ UCSD ]
Thanks, Liezel!
Grabbing an object as thin as a plastic bag is an incredible challenge for robotic hands, but Phoenix robots have the fine manipulation required to do it.
[ Sanctuary ]
Catching high-speed targets in flight is a complex and typically highly dynamic task. However, existing methods require manual setting of catching height or time, resulting in a lack of adaptability and flexibility and an inability to deal with multiple targets. To bridge this gap, we propose a planning-with-decision scheme called Catch Planner. Extensive experiments are carried out in real-world and simulated scenes to verify the robustness and expansibility when facing a variety of high-speed flying targets.
[ HKUST ]
This paper discusses the incorporation of a pair of Supernumerary Robotic Limbs (SuperLimbs) onto the next generation of NASA space suits. The wearable robots attached to the space suit assist an astronaut in performing extravehicular activities (EVAs). A full-scale prototype of Space Suit SuperLimbs was constructed and tested. Results from the experimentation indicated that with the aid of SuperLimbs, metabolic loading during EVAs is reduced significantly.
[ MIT ]
The next frontier of technology is here. Meet Torc Robotics' self-driving semitrucks, the next great advancement in the vast world of transportation. With innovation, safety, and efficiency in mind, Torc Robotics has engineered autonomous vehicles that are revolutionizing our present and future.
[ Torc Robotics ]
The Bristol Robotics Lab is full of good people.
[ BRL ]
In honor of Raj Reddy's 60th birthday in 1998, a symposium and celebration was held where many leaders in the field of AI and computer science spoke. Herbert Simon gave this forward-looking talk that is not only historically relevant but also speaks to the issues surrounding artificial intelligence that we are discussing today.
[ CMU ]
On this episode of The Robot Brains Podcast, Pieter interviews Raff D'Andrea.
[ Robot Brains ]
This GRASP on Robotics talk is from Pauline Pounds and the University of Queensland: Drones, Bipeds and Sensors-10 Years of the UQ Robotics Design Lab.
[ UPenn ]