Quadruped Robots Can Climb Ladders Now
When we look at quadruped robots, it's impossible not to compare them to quadruped animals like dogs and cats. Over the last several years, such robots have begun to approach the capabilities of their biological counterparts under just a few very specific situations, like walking without falling over. Biology provides a gold standard that robots are striving to reach, and it's going to take us a very long time to make quadrupeds that can do everything that animals can.
The cool thing about robots, though, is that they don't have to be constrained by biology, meaning that there's always the potential for them to learn new behaviors that animals simply aren't designed for. At IROS 2019 last week, we saw one such example, with a quadruped robot that's able to climb vertical ladders.
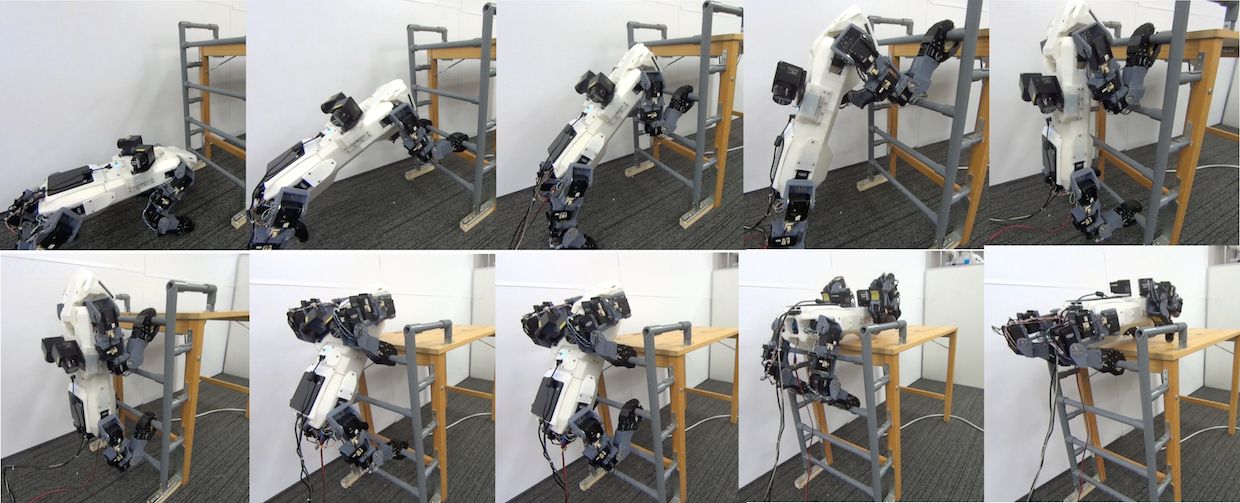 Photo: Tokyo Metropolitan University To generate the robot's autonomous climbing behavior, the researchers used a recurrent neural network that trained it to ascend the ladder. The behavior was created for this specific ladder, but the researchers plan to generalize the system so that the robot can climb new ladders without prior training.
Photo: Tokyo Metropolitan University To generate the robot's autonomous climbing behavior, the researchers used a recurrent neural network that trained it to ascend the ladder. The behavior was created for this specific ladder, but the researchers plan to generalize the system so that the robot can climb new ladders without prior training. A casual Google search makes it seems like vertical ladder climbing is quite challenging for biological quadrupeds. Dogs can do it, although usually you see them climbing up ladders that are angled (leaning against something) rather than vertical. Cats are a bit better, but vertical ladders still look like a challenge for them, especially if they can't use their claws to grip. The problem is as the steepness of a ladder increases to vertical, your center of mass moves farther and farther away from the rungs, and you have to support an increasing amount of your own weight by actively gripping rungs rather than just standing on them, which is a problem for animals that don't have robust grasping systems.
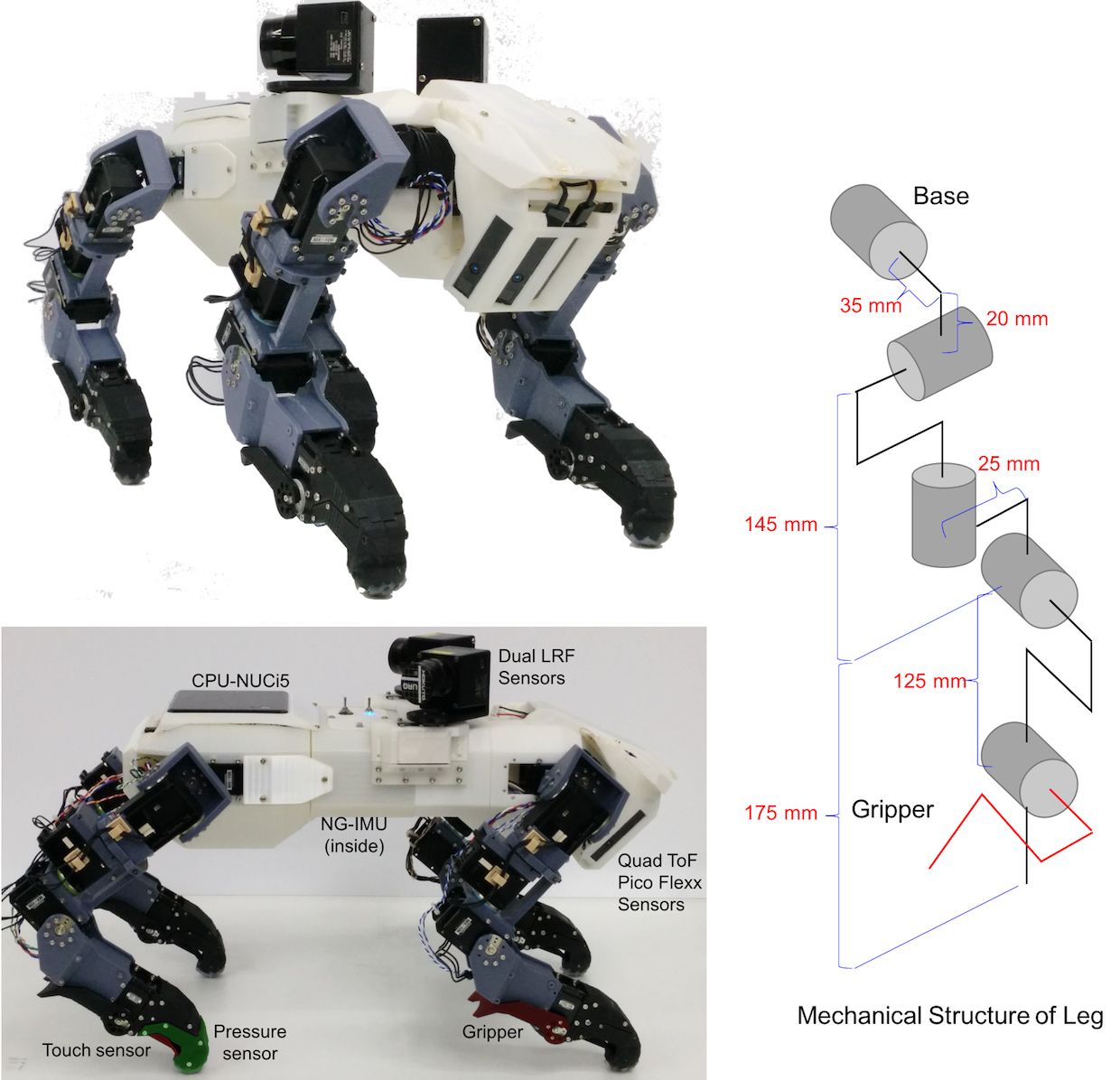 Image: Tokyo Metropolitan University To climb the ladder, the quadruped robot is equipped with an inertial measurement unit (IMU), time-of-flight 3D camera on its face, and touch and force sensors on each claw. An Intel NUC computer acts as the main control system, with an Arduino used as a secondary controller to manage the input-output signals of the internal sensors (force, touch, and IMU). The robot has 23 degrees of freedom (DoF): 5 DoF in each leg, 2 DoF for the dual laser rangefinder sensors, and 1 DoF for the head.
Image: Tokyo Metropolitan University To climb the ladder, the quadruped robot is equipped with an inertial measurement unit (IMU), time-of-flight 3D camera on its face, and touch and force sensors on each claw. An Intel NUC computer acts as the main control system, with an Arduino used as a secondary controller to manage the input-output signals of the internal sensors (force, touch, and IMU). The robot has 23 degrees of freedom (DoF): 5 DoF in each leg, 2 DoF for the dual laser rangefinder sensors, and 1 DoF for the head. Most robotic quadrupeds don't have robust grasping systems either, but adding such a system to a robot seems like a promising idea to explore. Roboticists at Tokyo Metropolitan University have built a cute little (7 kilograms) quadruped with 5 degrees-of-freedom legs that include a sort of opposable thumb that turn its feet into grippers. It's able to use those grippers to climb vertical handrail-free ladders fully autonomously.
That transition from the ladder to the upper surface seems quite tricky to perform, and it's particularly clever how the robot uses its hind legs to grasp the top rung and use it to propel itself onto the platform. It's also worth noting that the autonomous system was trained on this specific ladder, and that it took five tries to get it right, although the researchers say that the failures were due to lack of actuator torque rather than their overall approach. They plan to fix this in future work, as well as to generalize the system so that it can climb new ladders without prior training.
"A Novel Capability of Quadruped Robot Moving Through Vertical Ladder Without Handrail Support," by Azhar Aulia Saputra, Yuichiro Toda, Naoyuki Takesue, and Naoyuki Kubota from Tokyo Metropolitan University and Okayama University, was presented at IROS 2019 in Macau.