Stretch Is Boston Dynamics’ Take on a Practical Mobile Manipulator for Warehouses
Today, Boston Dynamics is announcing Stretch, a mobile robot designed to autonomously move boxes around warehouses. At first glance, you might be wondering why the heck this is a Boston Dynamics robot at all, since the dynamic mobility that we associate with most of their platforms is notably absent. The combination of strength and speed in Stretch's arm is something we haven't seen before in a mobile robot, and it's what makes this a unique and potentially exciting entry into the warehouse robotics space.
Useful mobile manipulation in any environment that's not almost entirely structured is still a significant challenge in robotics, and it requires a very difficult combination of sensing, intelligence, and dynamic motion, all of which are classic Boston Dynamics. But also classic Boston Dynamics is building really cool platforms, and only later trying to figure out a way of making them commercially viable. So why Stretch, why boxes, why now, and (the real question) why not Handle? We talk with Boston Dynamics' Vice President of Product Engineering Kevin Blankespoor to find out.
Stretch is very explicitly a box-handling mobile robot for relatively well structured warehouses. It's in no way designed to be a generalist that many of Boston Dynamics' other robots are. And to be fair, this is absolutely how to make a robot that's practical and cost effective right out of the crate: Identify a task that is dull or dirty or dangerous for humans, design a robot to do that task safely and efficiently, and deploy it with the expectation that it'll be really good at that task but not necessarily much else. This is a very different approach than a robot like Spot, where the platform came first and the practical applications came later-with Stretch, it's all about that specific task in a specific environment.

There are already robotic solutions for truck unloading, palletizing, and depalletizing, but Stretch seems to be uniquely capable. For truck unloading, the highest performance systems that I'm aware of are monstrous things (here's one example from Honeywell) that use a ton of custom hardware to just sort of ingest the cargo within a trailer all at once. In a highly structured and predictable warehouse, this sort of thing may pay off over the long term, but it's going to be extremely expensive and not very versatile at all.
Palletizing and depalletizing robots are much more common in warehouses today. They're almost always large industrial arms surrounded by a network of custom conveyor belts and whatnot, suffering from the same sorts of constraints as a truck unloader- very capable in some situations, but generally high cost and low flexibility.
 Photo: Boston Dynamics
Photo: Boston Dynamics Stretch is probably not going to be able to compete with either of these types of dedicated systems when it comes to sheer speed, but it offers lots of other critical advantages: It's fast and easy to deploy, easy to use, and adaptable to a variety of different tasks without costly infrastructure changes. It's also very much not Handle, which was Boston Dynamics' earlier (although not that much earlier) attempt at a box-handling robot for warehouses, and (let's be honest here) a much more Boston Dynamics-y thing than Stretch seems to be. To learn more about why the answer is Stretch rather than Handle, and how Stretch will fit into the warehouse of the very near future, we spoke with Kevin Blankespoor, Boston Dynamics' VP of Product Engineering and chief engineer for both Handle and Stretch.
IEEE Spectrum: Tell me about Stretch!
Kevin Blankespoor: Stretch is the first mobile robot that we've designed specifically for the warehouse. It's all about moving boxes. Stretch is a flexible robot that can move throughout the warehouse and do different tasks. During a typical day in the life of Stretch in the future, it might spend the morning on the inbound side of the warehouse unloading boxes from trucks. It might spend the afternoon in the aisles of the warehouse building up pallets to go to retailers and e-commerce facilities, and it might spend the evening on the outbound side of the warehouse loading boxes into the trucks. So, it really goes to where the work is.
There are already other robots that include truck unloading robots, palletizing and depalletizing robots, and mobile bases with arms on them. What makes Boston Dynamics the right company to introduce a new robot in this space?
We definitely thought through this, because there are already autonomous mobile robots [AMRs] out there. Most of them, though, are more like pallet movers or tote movers-they don't have an arm, and most of them are really just about moving something from point A to point B without manipulation capability. We've seen some experiments where people put arms on AMRs, but nothing that's made it very far in the market. And so when we started looking at Stretch, we realized we really needed to make a custom robot, and that it was something we could do quickly.
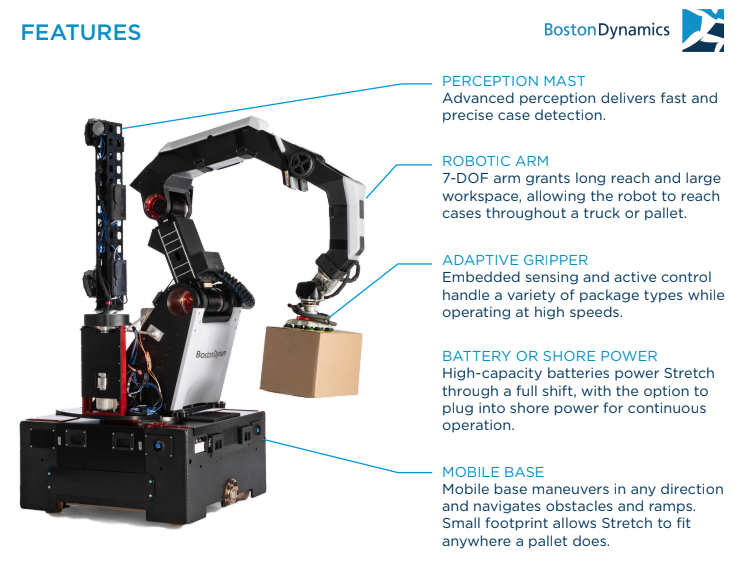
We got a lot of interest from people who wanted to put Atlas to work in the warehouse, but we knew that we could build a simpler robot to do some of those same tasks."Stretch is built with pieces from Spot and Atlas and that gave us a big head start. For example, if you look at Stretch's vision system, it's 2D cameras, depth sensors, and software that allows it to do obstacle detection, box detection, and localization. Those are all the same sensors and software that we've been using for years on our legged robots. And if you look closely at Stretch's wrist joints, they're actually the same as Spot's hips. They use the same electric motors, the same gearboxes, the same sensors, and they even have the same closed-loop controller controlling the joints.
If you were to buy an existing industrial robot arm with this kind of performance, it would be about four times heavier than the arm we built, and it's really hard to make that into a mobile robot. A lot of this came from our leg technology because it's so important for our leg designs to be lightweight for the robots to balance. We took that same strength to weight advantage that we have, and built it into this arm. We're able to rapidly piece together things from our other robots to get us out of the gate quickly, so even though this looks like a totally different robot, we think we have a good head start going into this market.
At what point did you decide to go with an arm on a statically stable base on Stretch, rather than something more, you know, dynamic-y?
Stretch looks really different than the robots that Boston Dynamics has done in the past. But you'd be surprised how much similarity there is between our legged robots and Stretch under the hood. Looking back, we actually got our start on moving boxes with Atlas, and at that point it was just research and development. We were really trying to do force control for box grasping. We were picking up heavy boxes and maintaining balance and working on those fundamentals. We released a video of that as our first next-gen Atlas video, and it was interesting. We got a lot of interest from people who wanted to put Atlas to work in the warehouse, but we knew that we could build a simpler robot to do some of those same tasks.
So at this point we actually came up with Handle. The intent of Handle was to do a couple things-one was, we thought we could build a simpler robot that had Atlas' attributes. Handle has a small footprint so it can fit in tight spaces, but it can pick up heavy boxes. And in addition to that, we had always really wanted to combine wheels and legs. We'd been talking about doing that for a decade and so Handle was a chance for us to try it.
We built a couple versions of Handle, and the first one was really just a prototype to kind of explore the morphology. But the second one was more purpose-built for warehouse tasks, and we started building pallets with that one and it looked pretty good. And then we started doing truck unloading with Handle, which was the pivotal moment. Handle could do it, but it took too long. Every time Handle grasped a box, it would have to roll back and then get to a place where it could spin itself to face forward and place the box, and trucks are very tight for a robot this size, so there's not a lot of room to maneuver. We knew the whole time that there was a robot like Stretch that was another alternative, but that's really when it became clear that Stretch would have a lot of advantages, and we started working on it about a year ago.
Stretch is certainly impressive in a practical way, but I'll admit to really hoping that something like Handle could have turned out to be a viable warehouse robot.
I love the Handle project as well, and I'm very passionate about that robot. And there was a stage before we built Stretch where we thought, this would be pretty standard looking compared to Handle, is it going to capture enough of the Boston Dynamics secret sauce?" But when you actually dissect all the problems within Stretch that you have to tackle, there are a lot of cool robotics problems left in there-the vision system, the planning, the manipulation, the grasping of the boxes-it's a lot harder to solve than it looks, and we're excited that we're actually getting fairly far down that road now.
What happens to Handle now?
Stretch has really taken over our team as far as warehouse products go. Handle we still use occasionally as a research robot, but it's not actively under development. Stretch is really Handle's descendent. Handle's not retired, exactly, but we're just using it for things like the dance video.
There's still potential to do cool stuff with Handle. I do think that combining wheels with legs is very cool, and largely unexplored compared to its potential. So I still think that you're gonna see versions of robots combining wheels and legs like Handle, and maybe a version of Handle in the future that does more of that. But because we're switching this thread from research into product, Stretch is really the main focus now.
How autonomous is Stretch?
Stretch is semi-autonomous, and that means it really needs to work with people to tap into its full potential. With truck unloading, for example, a person will drive Stretch into the back of the truck and then basically point Stretch in the right direction and say go. And from that point on, everything's autonomous. Stretch has its vision system and its mobility and it can detect all the boxes, grasp all boxes, and move them onto a conveyor all autonomously. This is something that takes people hours to do manually, and Stretch can go all the way until it gets to the last box, and the truck is empty. There are some parts of the truck unloading task that do require people, like verifying that the truck is in the right place and opening the doors. But this takes a person just a few minutes, and then the robot can spend hours or as long as it takes to do its job autonomously.
There are also other tasks in the warehouse where the autonomy will increase in the future. After truck unloading, the second thing we'll take on is order building, which will be more in the aisles of a warehouse. For that, Stretch will be navigating around the warehouse, finding the right pallet it needs to take a box from, and loading it onto a new pallet. This will be a different model with more autonomy; you'll still have people involved to some degree, but the robot will have a higher percentage of the time where it can work independently.
What kinds of constraints is Stretch operating under? Do the boxes all have to be stacked neatly in the back of the truck, do they have to be the same size, the same color, etc?
This will be a different model with more autonomy. You'll still have people involved to some degree, but the robot will have a higher percentage of the time where it can work independently."If you think about manufacturing, where there's been automation for decades, you can go into a modern manufacturing facility and there are robot arms and conveyors and other machines. But if you look at the actual warehouse space, 90+ percent is manually operated, and that's because of what you just asked about- things that are less structured, where there's more variety, and it's more challenging for a robot. But this is starting to change. This is really, really early days, and you're going to be seeing a lot more robots in the warehouse space.
The warehouse robotics industry is going to grow a lot over the next decade, and a lot of that boils down to vision-the ability for robots to navigate and to understand what they're seeing. Actually seeing boxes in real world scenarios is challenging, especially when there's a lot of variety. We've been testing our machine learning-based box detection system on Pick for a few years now, and it's gotten far enough that we know it's one of the technical hurdles you need to overcome to succeed in the warehouse.
Can you compare the performance of Stretch to the performance of a human in a box-unloading task?
Stretch can move cases up to 50 pounds which is the OSHA limit for how much a single person's allowed to move. The peak case rate for Stretch is 800 cases per hour. You really need to keep up with the flow of goods throughout the warehouse, and 800 cases per hour should be enough for most applications. This is similar to a really good human; most humans are probably slower, and it's hard for a human to sustain that rate, and one of the big issues with people doing this jobs is injury rates. Imagine moving really heavy boxes all day, and having to reach up high or bend down to get them-injuries are really common in this area. Truck unloading is one of the hardest jobs in a warehouse, and that's one of the reasons we're starting there with Stretch.
Is Stretch safe for humans to be around?
We looked at using collaborative robot arms for Stretch, but they don't have the combination of strength and speed and reach to do this task. That's partially just due to the laws of physics-if you want to move a 50lb box really fast, that's a lot of energy there. So, Stretch does need to maintain separation from humans, but it's pretty safe when it's operating in the back of a truck.
In the middle of a warehouse, Stretch will have a couple different modes. When it's traveling around it'll be kind of like an AMR, and use a safety-rated lidar making sure that it slows down or stops as people get closer. If it's parked and the arm is moving, it'll do the same thing, monitoring anyone getting close and either slow down or stop.
How do you see Stretch interacting with other warehouse robots?
For building pallet orders, we can do that in a couple of different ways, and we're experimenting with partners in the AMR space. So you might have an AMR that moves the pallet around and then rendezvous with Stretch, and Stretch does the manipulation part and moves boxes onto the pallet, and then the AMR scuttles off to the next rendezvous point where maybe a different Stretch meets it. We're developing prototypes of that behavior now with a few partners. Another way to do it is Stretch can actually pull the pallet around itself and do both tasks. There are two fundamental things that happen in the warehouse: there's movement of goods, and there's manipulation of goods, and Stretch can do both.
You're aware that Hello Robot has a mobile manipulator called Stretch, right?
Great minds think alike! We know Aaron [Edsinger] from the Google days; we all used to be in the same company, and he's a great guy. We're in very different applications and spaces, though- Aaron's robot is going into research and maybe a little bit into the consumer space, while this robot is on a much bigger scale aimed at industrial applications, so I think there's actually a lot of space between our robots, in terms of how they'll be used.
Editor's Note: We did check in with Aaron Edsinger at Hello Robot, and he sees things a little bit differently. We're disappointed they chose our name for their robot," Edsinger told us. We're seriously concerned about it and considering our options." We sincerely hope that Boston Dynamics and Hello Robot can come to an amicable solution on this.What's the timeline for commercial deployment of Stretch?
This is a prototype of the Stretch robot, and anytime we design a new robot, we always like to build a prototype as quickly as possible so we can figure out what works and what doesn't work. We did that with our bipeds and quadrupeds as well. So, we get an early look at what we need to iterate, because any time you build the first thing, it's not the right thing, and you always need to make changes to get to the final version. We've got about six of those Stretch prototypes operating now. In parallel, our hardware team is finishing up the design of the productized version of Stretch. That version of Stretch looks a lot like the prototype, but every component has been redesigned from the ground up to be manufacturable, to be reliable, and to be higher performance.
For the productized version of Stretch, we'll build up the first units this summer, and then it'll go on sale next year. So this is kind of a sneak peak into what the final product will be.
How much does it cost, and will you be selling Stretch, or offering it as a service?
We're not quite ready to talk about cost yet, but it'll be cost effective, and similar in cost to existing systems if you were to combine an industrial robot arm, custom gripper, and mobile base. We're considering both selling and leasing as a service, but we're not quite ready to narrow it down yet.
 Photo: Boston Dynamics
Photo: Boston Dynamics As with all mobile manipulators, what Stretch can do long-term is constrained far more by software than by hardware. With a fast and powerful arm, a mobile base, a solid perception system, and 16 hours of battery life, you can imagine how different grippers could enable all kinds of different capabilities. But we're getting ahead of ourselves, because it's a long, long way from getting a prototype to work pretty well to getting robots into warehouses in a way that's commercially viable long-term, even when the use case is as clear as it seems to be for Stretch.
Stretch also could signal a significant shift in focus for Boston Dynamics. While Blankespoor's comments about Stretch leveraging Boston Dynamics' expertise with robots like Spot and Atlas are well taken, Stretch is arguably the most traditional robot that the company has designed, and they've done so specifically to be able to sell robots into industry. This is what you do if you're a robotics company who wants to make money by selling robots commercially, which (historically) has not been what Boston Dynamics is all about. Despite its bonkers valuation, Boston Dynamics ultimately needs to make money, and robots like Stretch are a good way to do it. With that in mind, I wouldn't be surprised to see more robots like this from Boston Dynamics-robots that leverage the company's unique technology, but that are designed to do commercially useful tasks in a somewhat less flashy way. And if this strategy keeps Boston Dynamics around (while funding some occasional creative craziness), then I'm all for it.