Top Half of a Robot Giraffe

This article is part of our exclusive IEEE Journal Watch series in partnership with IEEE Xplore.
When we think about flexibility in bioinspired robots, the best examples can usually be found in soft robots that mimic octopus arms or elephant trunks, which have some unique capabilities. But most animals are soft and flexible to some extent, just typically coupled with a rigid interior structure. It's a complex arrangement, albeit one with some significant advantages in power and control.
Researchers at the Tokyo Institute of Technology have been experimenting with mimicking what is arguably one of the most impressive combinations of flexibility and power in the animal kingdom: the neck of the giraffe. Giraffe necks can weigh up to 150 kilograms and be 2 meters long, but they've evolved to be bendy and strong, not just to get those tasty high-growing leaves but also because male giraffes battle each other with their necks, occasionally to the death. What better inspiration for designing large robots, right?
As a first step toward realizing a powerful and flexible robot, we built a half-scale musculoskeletal robot, mimicking the structure and mechanism of the giraffe neck based on anatomical knowledge, and reproduced part of its characteristics.
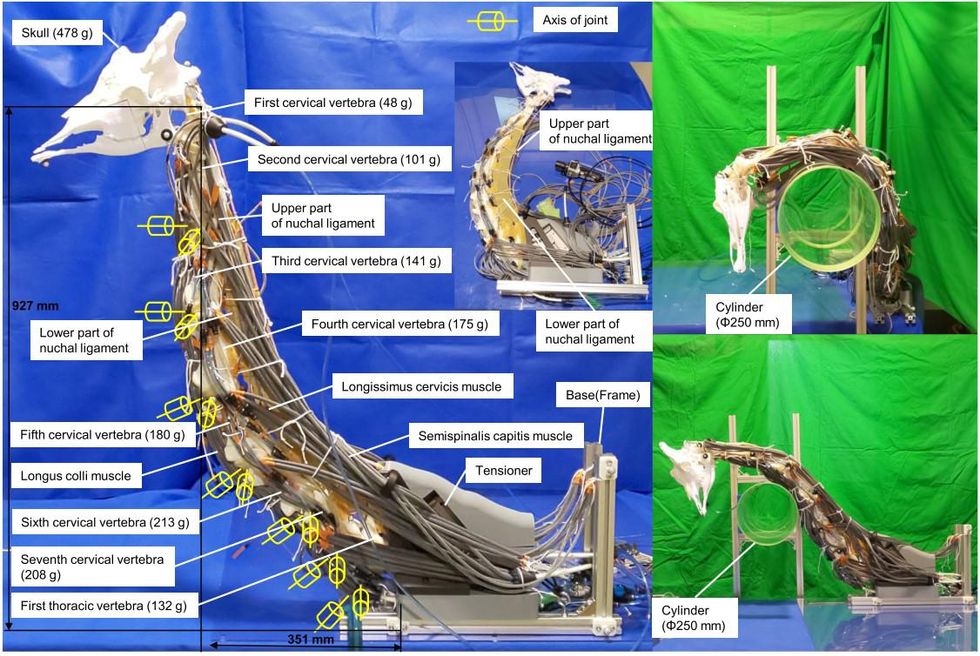
The mechanism consists of a skeletal mechanism fabricated using a 3D printer, a gravity-compensation mechanism mimicking nuchal ligament using rubber material and tensioners, a redundant muscle driving system using thin artificial muscles, and a particular joint using rubber disks and mimicking ligaments.
The robotic giraffe neck does its best to mimic the structure of an actual giraffe neck (the paper includes a photo of the partially dissected neck of a real giraffe), with vertebrae and tendons arranged similarly-and thin McKibben pneumatic artificial muscles providing contracting forces the same way real muscles do. It's complicated, but it enables a significant amount of flexibility:
 Tokyo Institute of Technology
Tokyo Institute of Technology
The authors of the paper helpfully point out that giraffes are able to leverage the power and flexibility of their necks in contact with each other nondestructively, which is not something conventional mechanical systems can do:
Thus far, researchers have not developed machines or robots having similar powerfulness and flexibility characteristics on par with the giraffe's neck. For example, if two actual industrial cranes fight, it would be easy to imagine that the damage would be catastrophic, resulting in two broken cranes.
I am now trying to imagine two actual industrial cranes fighting, which would almost certainly look nothing like this:
Compare this to real giraffes necking, which is both less destructive and doesn't do weird things to a classic comic:
National Geographic
Anyway, the researchers suggest that developing a robotic system with a practical combination of power, flexibility, and control might be more straightforward to do with a giraffe neck model than an elephant trunk model. You'd sacrifice some softness and flexibility, but you might be able to actually make it work in a way that could execute the amount of force required to be useful in industrial applications.
The name of this robot is Giraffe Neck Robot #1, which, while not the most creative, does suggest that other robots will follow. From the sound of things, the next step will be cranking up the power by several orders of magnitude (!) by using hydraulic rather than pneumatic actuators.
Giraffe Neck Robot: First Step Toward a Powerful and Flexible Robot Prototyping Based on Giraffe Anatomy, by Atsuhiko Niikura, Hiroyuki Nabae, Gen Endo, Megu Gunji, Kent Mori, Ryuma Niiyama, and Koichi Suzumori from Tokyo Institute of Technology is published in IEEE Robotics and Automation Letters.