MIT Multirobot Mapping Sets New “Gold Standard”
This article is part of our exclusive IEEE Journal Watch series in partnership with IEEE Xplore.
Does your robot know where it is right now? Does it? Are you sure? And what about all of its robot friends-do they know where they are too? This is important. So important, in fact, that some would say that multirobot simultaneous localization and mapping (SLAM) is a crucial capability to obtain timely situational awareness over large areas. Those some would be a group of MIT roboticists who just won the IEEE Transactions on Robotics Best Paper Award for 2022, presented at this year's IEEE International Conference on Robotics and Automation (ICRA 2023), in London. Congratulations!
Out of more than 200 papers published in Transactions on Robotics last year, reviewers and editors voted to present the 2022 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award to Yulun Tian, Yun Chang, Fernando Herrera Arias, Carlos Nieto-Granda, Jonathan P. How, and Luca Carlone from MIT for their paper Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems.
The editorial board, and the reviewers, were deeply impressed by the theoretical elegance and practical relevance of this paper and the open-source code that accompanies it. Kimera-Multi is now the gold standard for distributed multirobot SLAM."
-Kevin Lynch, editor in chief, IEEE Transactions on Robotics
Robots rely on simultaneous localization and mapping to understand where they are in unknown environments. But unknown environments are a big place, and it takes more than one robot to explore all of them. If you send a whole team of robots, each of them can explore their own little bit, and then share what they've learned with one another to make a much bigger map that they can all take advantage of. Like most things robot, this is much easier said than done, which is why Kimera-Multi is so useful and important. The award-winning researchers say that Kimera-Multi is a distributed system that runs locally on a bunch of robots all at once. If one robot finds itself in communications range with another robot, they can share map data, and use those data to build and improve a globally consistent map that includes semantic annotations.
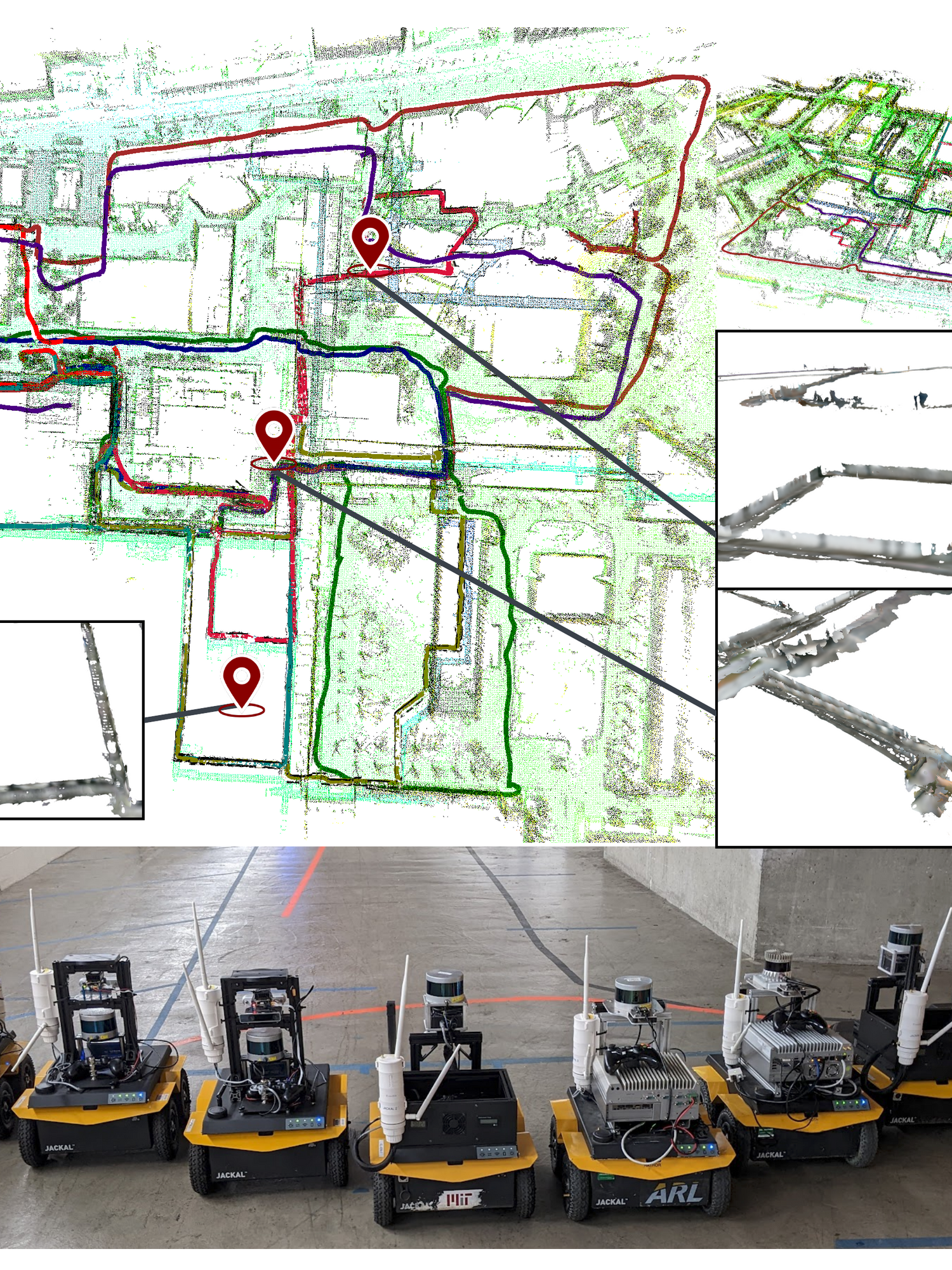
Since filming the above video, the researchers have done real-world tests with Kimera-Multi. Below is an example of the map generated by three robots as they travel a total of more than 2 kilometers. You can easily see how the accuracy of the map improves significantly as the robots talk to each other:
More details and code are available on GitHub.
Transactions on Robotics also selected some excellent Honorable Mentions for 2022:
Stabilization of Complementarity Systems via Contact-Aware Controllers, by Alp Aydinoglu, Philip Sieg, Victor M. Preciado, and Michael Posa
Autonomous Cave Surveying With an Aerial Robot, by Wennie Tabib, Kshitij Goel, John Yao, Curtis Boirum, and Nathan Michael
Prehensile Manipulation Planning: Modeling, Algorithms and Implementation, by Florent Lamiraux and Joseph Mirabel
Rock-and-Walk Manipulation: Object Locomotion by Passive Rolling Dynamics and Periodic Active Control, by Abdullah Nazir, Pu Xu, and Jungwon Seo
Origami-Inspired Soft Actuators for Stimulus Perception and Crawling Robot Applications, by Tao Jin, Long Li, Tianhong Wang, Guopeng Wang, Jianguo Cai, Yingzhong Tian, and Quan Zhang