Video Friday: Morphing Adaptive Robots
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
Enjoy today's videos!
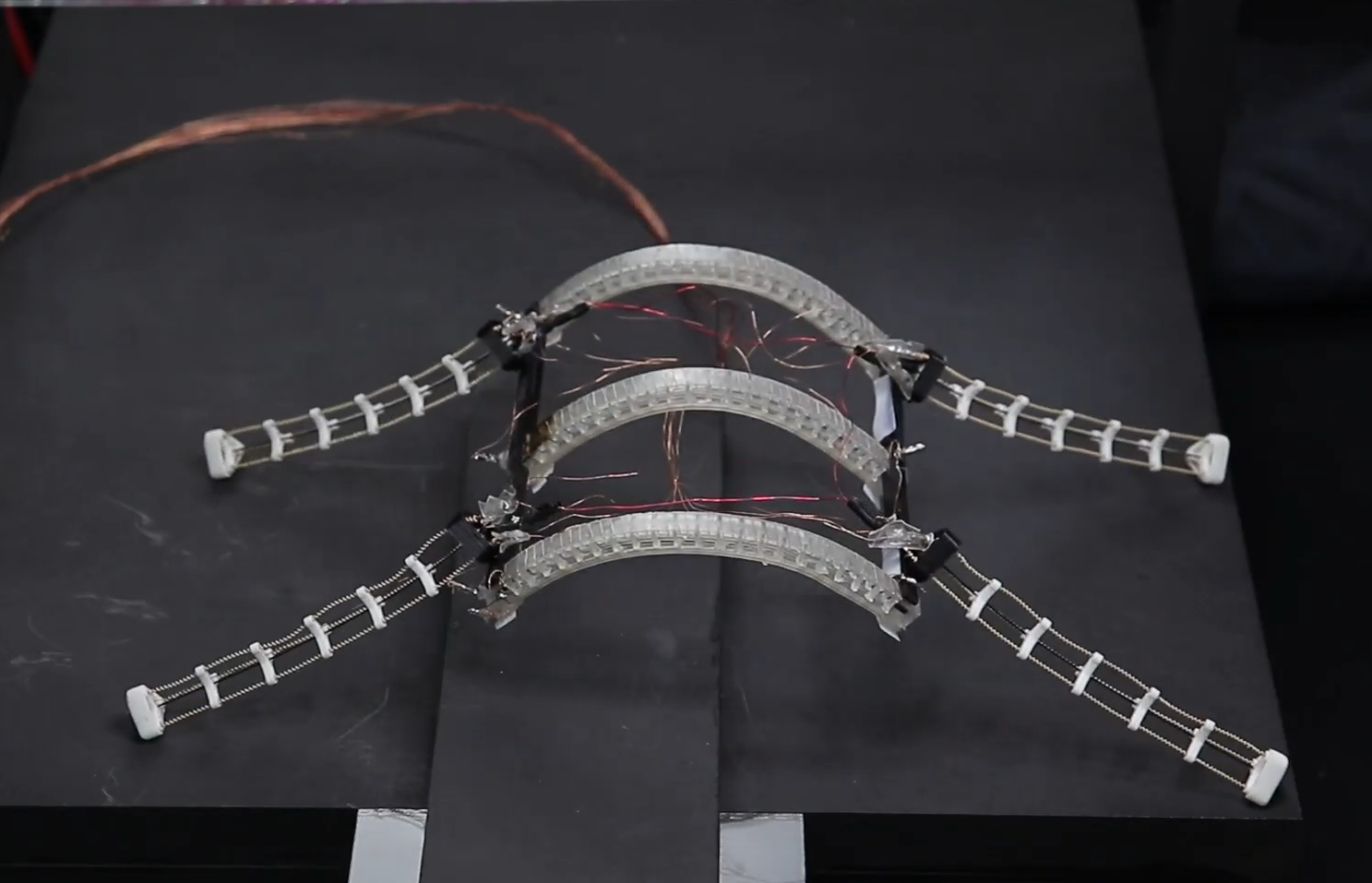
Pulling inspiration from the natural world, we have developed a trio of robots that can morph their bodies and legs as needed to better crawl, shimmy, or swim over difficult terrain. These new robotic systems are designed to mimic the way biological organisms adapt their shape depending on their life cycle or environment and were developed by a team from the Department of Mechanical Engineering. The work is described in a new paper published in Nature Communications, which outlines the three robotic types and their different abilities, including gripping, climbing, and amphibious travel.
[ Nature ] via [ Adaptive Robotics Lab ]
Thanks, Jianguo!
LimX Dynamics has launched its first wheeled quadruped robot: W1. W1 is equipped with perception and motion-control algorithms, and multiple proprietary high-performing actuators. It combines the advantages of legged and wheeled structures all in one, enabling it with powerful real-time terrain perception and all-terrain mobility.
Pre-orders should open before the end of this year.
[ LimX Dynamics ]
Robots built by engineers at the University of California, San Diego helped achieve a major breakthrough in understanding how insect flight evolved, described in the 4 October 2023 issue of the journal Nature.
[ UCSD ]
Dino Robotics' cobot demonstrates machine tending, featuring 3D environment scanning, bin picking of provided parts without mechanical fixtures, and force-controlled part-feeding.
[ Dino Robotics ]
This is clever: a chameleon-inspired suction gripper that grabs and retracts without any active sensing at all.
[ IEEE Robotics and Automation Letters ] via [ SNU ]
You should probably not do this with your lidar.
Somehow, I feel like I'm getting called out here...
[ Norlab ]
Imagine dogs effortlessly managing a wide array of items, their versatile mouths allowing them to grasp and hold easily. Inspired by their natural abilities, we crafted a robotic gripper. Enhancing our passive-jamming lip and incorporating the ingenious structure of a dog's teeth, our gripper now possesses the dexterity and precision to handle objects in daily life.
[ KIMLAB ]
The potential of Martian lava tubes for resource extraction and habitat sheltering highlights the need for robots capable of undertaking the grueling task of their exploration. Driven by this motivation, in this work we introduce a legged robot system optimized for jumping in the low gravity of Mars, designed with leg configurations adaptable to both bipedal and quadrupedal systems.
[ ARL ]
How self-healing is self-healing? Let's find out!
[ BruBotics ]
Seems like GITAI is planning to test some of its robots outside of the International Space Station.
[ GITAI ]