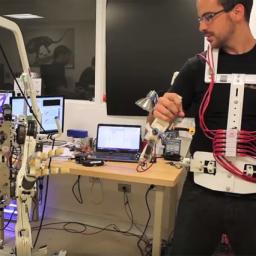
MIT's bipedal robot “HERMES†designed for disaster response
 Advances in robotics are entering a new phase of complexity, including in the essential balance feedback response area of research, which is essential to mobility. Check out HERMES, as just one example:
Advances in robotics are entering a new phase of complexity, including in the essential balance feedback response area of research, which is essential to mobility. Check out HERMES, as just one example:The researchers worked with HERMES, a 100-pound biped robot designed by the MIT team, along with the interface, for disaster response. They envision deploying HERMES to a disaster site, where the robot would explore the area, guided by a human operator from a remote location. The researchers will present a paper on the interface at the IEEE/RSJ International Conference on Intelligent Robots and Systems in September. MIT's two-legged robot is wreaking controlled havoc: punching through drywall, smashing soda cans, kicking over trash buckets, and karate-chopping boards in half. The robots actions, however, are not its own. Just a few feet away, PhD student Joao Ramos stands on a platform, wearing an exoskeleton of wires and motors.
Ed note: I propose building two of these things, and then having the two researchers/controllers fight it out.