Real-time Linux is officially part of the kernel after decades of debate
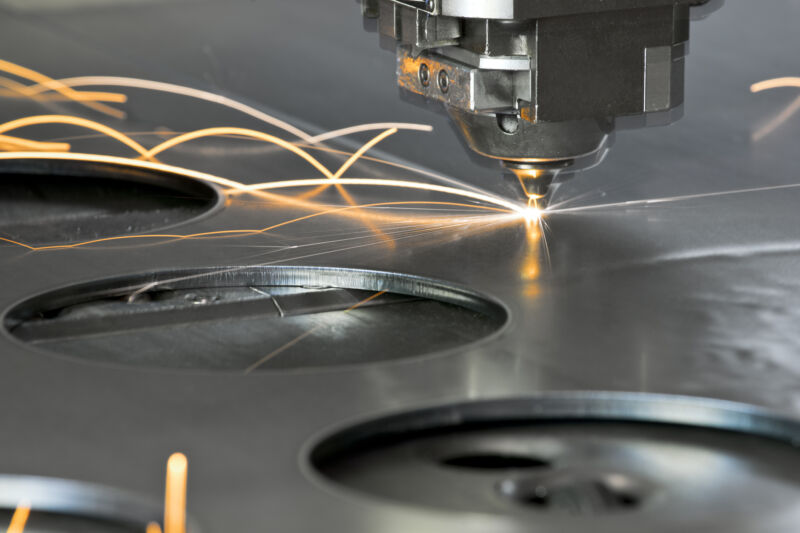
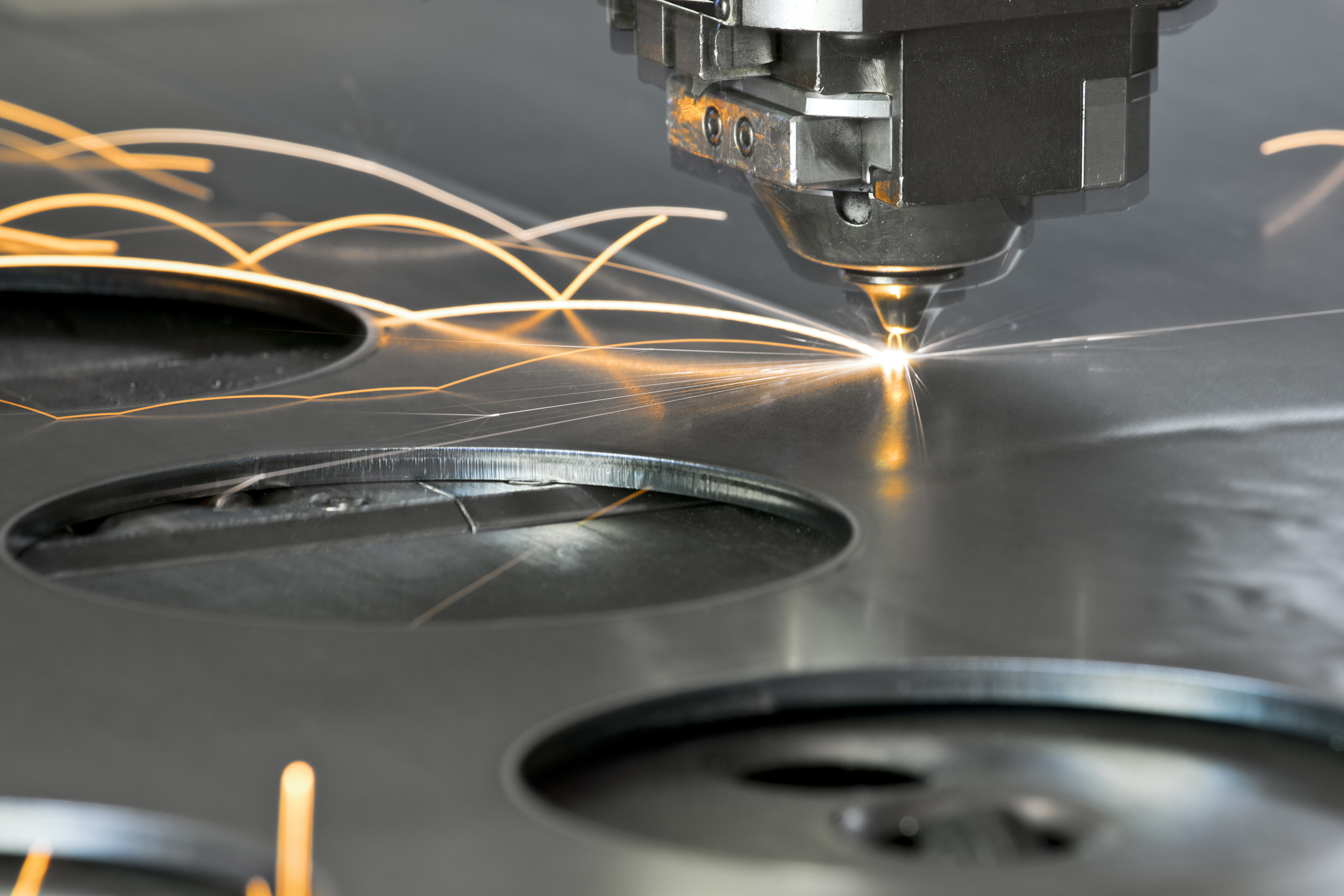
Enlarge / Cutting metal with lasers is hard, but even harder when you don't know the worst-case timings of your code. (credit: Getty Images)
{kind=link}
As is so often the case, a notable change in an upcoming Linux kernel is both historic and no big deal.
If you wanted to use "Real-Time Linux" for your audio gear, your industrial welding laser, or your Mars rover, you have had that option for a long time (presuming you didn't want to use QNX or other alternatives). Universities started making their own real-time kernels in the late 1990s. A patch set, PREEMPT_RT, has existed since at least 2005. And some aspects of the real-time work, like NO_HZ, were long ago moved into the mainline kernel, enabling its use in data centers, cloud computing, or anything with a lot of CPUs.
But officialness still matters, and in the 6.12 kernel, PREEMPT_RT will likely be merged into the mainline. As noted by Steven Vaughan-Nichols at ZDNet, the final sign-off by Linus Torvalds occurred while he was attending Open Source Summit Europe. Torvalds wrote the original code for printk, a debugging tool that can pinpoint exact moments where a process crashes, but also introduces latency that runs counter to real-time computing. The Phoronix blog has tracked the progress of PREEMPT_RT into the kernel, along with the printk changes that allowed for threaded/atomic console support crucial to real-time mainlining.